
The State of Robotics in 2025: Why the Hype Isn't Lying (Yet)
A deep dive into the four critical bottlenecks slowing the robotics revolution and why general-purpose robots remain inevitable
Software engineer focused on robotics simulation, CI reliability, ML evaluation, and data infrastructure. Recent work: an openpilot MetaDrive CI PR with 20 consecutive full workflow passes.

Submitted an upstream openpilot PR for bounty #30693: Linux GitHub Actions simulator coverage for MetaDrive, CI-scoped reliability fixes, log artifacts, and 20 consecutive full workflow passes on a single submitted commit.
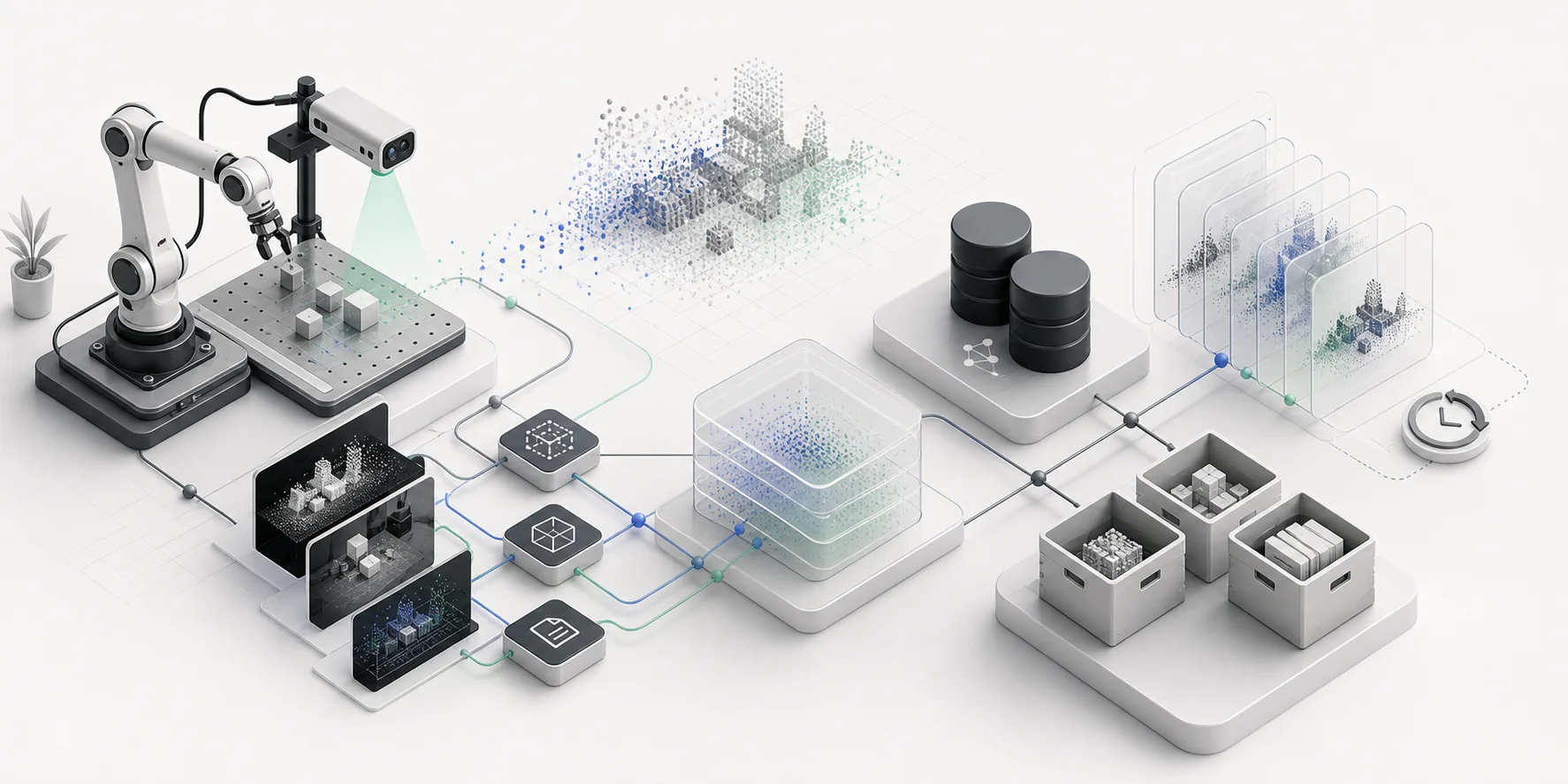
Built a ROS2/C++ teleoperation and data-capture prototype, with MinIO and LakeFS backing roughly 500GB of RGB-D and geometry logs for reproducible dataset snapshots and rollback.
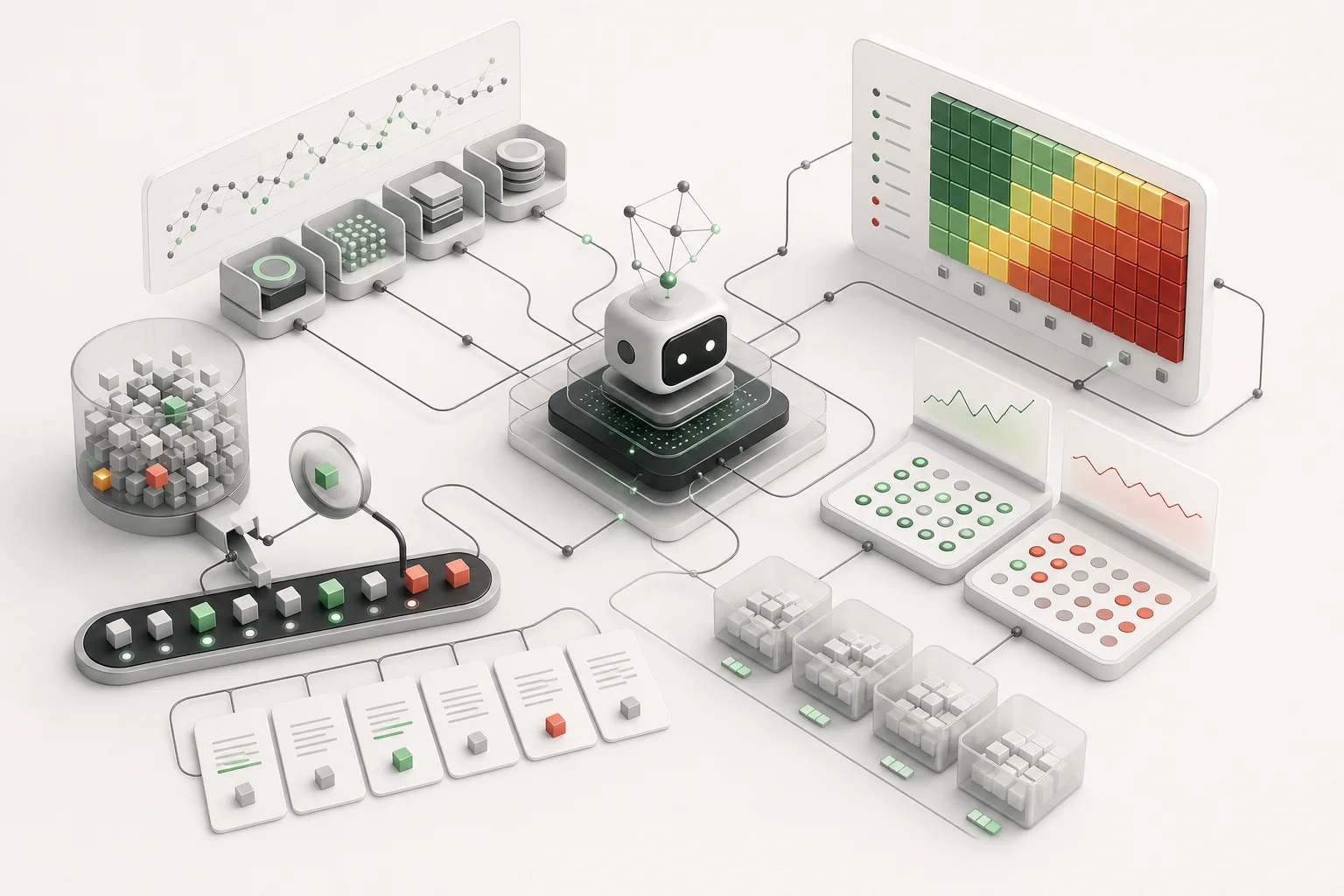
ReAct agent with memory-mode ablations and needle-in-haystack benchmarks. Eval-driven development: define the failure mode, write the test, then improve the system until it passes.
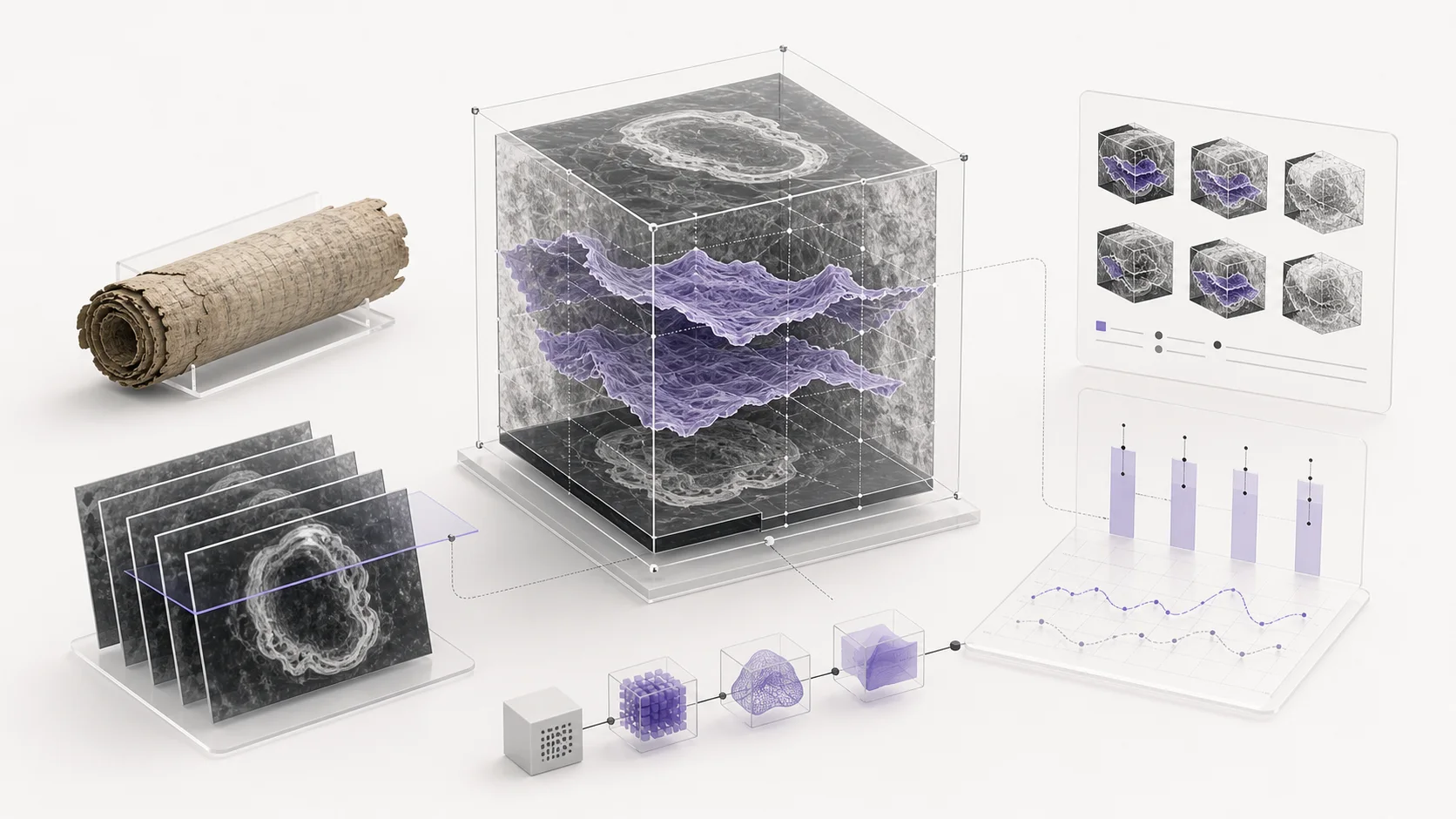
3D volumetric deep learning for detecting ancient papyrus surfaces in CT scans of carbonized Herculaneum scrolls. Focused on data handling, model evaluation, and segmentation quality.
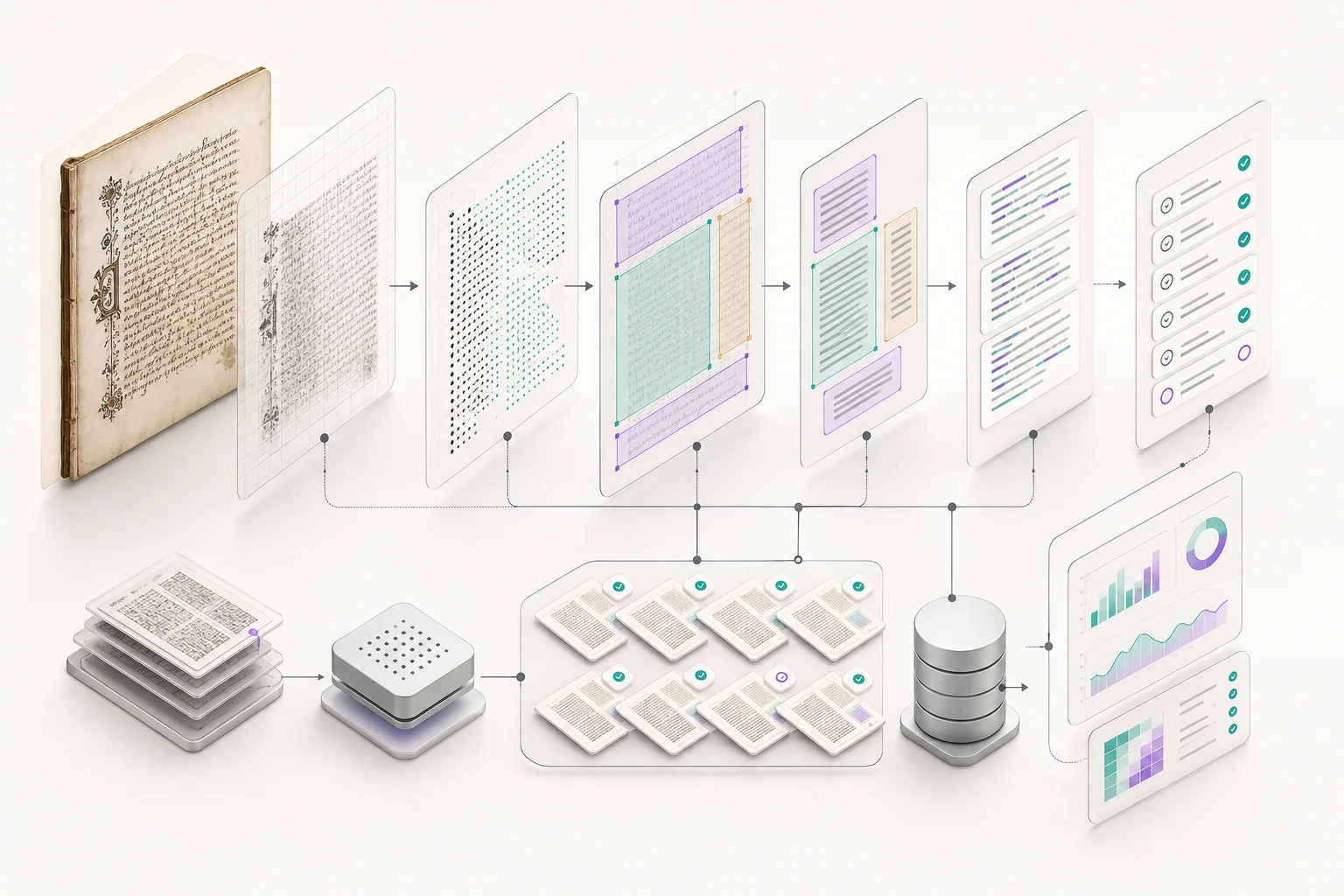
Open-source document understanding pipeline for Renaissance manuscripts using LayoutLMv3, OCR, structured logging, validation, and batch-processing failure handling.
A deep dive into the four critical bottlenecks slowing the robotics revolution and why general-purpose robots remain inevitable
A deep dive into how Partial Information Decomposition (PID) reveals how different modalities interact in AI systems, from redundancy to synergy